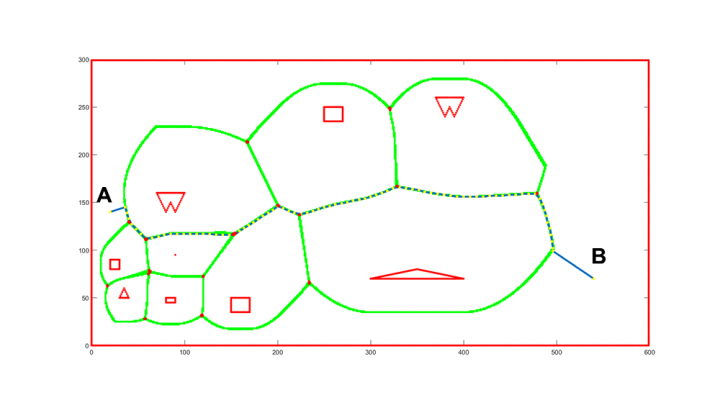
L’obiettivo di questo progetto è stato quello di realizzare un algoritmo che fornisse ad un Robot posizionato in un punto A all’interno di un ambiente con presenza di muri e ostacoli la conoscenza del percorso da seguire per raggiungere un punto B fissato sulla mappa. Attraverso la creazione del diagramma di Voronoi della mappa in input e la ricerca su di esso del percorso da seguire che collega i punti...
Continua a leggere...TwistedApp Developer

Simone Tinella WebPage
TwistedApp Developer